Lo scopo di questa esperienza e’ l’analisi del moto di un pendolo del tipo massa-molla, detto pendolo di Wilberforce, nel quale una scelta particolare dei parametri consente di realizzare un accoppiamento tra moto di traslazione e moto di rotazione.
Questo apparato e’ dotato di un accelerometro/giroscopio MEMS e il software gratuito Phyphox per mostrare il movimento del dispositivo sullo schermo di uno smartphone/tablet.
La elaborazione dei dati acquisiti in tempo reale, ed esportati su un foglio elettronico, consente di evidenziare le varie componenti dell’energia associata alle oscillazioni (cinetica e potenziale-elastica, sia per l’oscillazione verticale che torsionale, ed infine l’energia di accoppiamento dei due moti) e di procedere al confronto con simulazioni numeriche.
L’analisi dettagliata delle componenti del moto del pendolo mettera’ in evidenza come le stesse siano caratterizzate da due frequenze distinte: dovute all’accoppiamento di diversi modi di oscillazione che possono essere eccitati a seconda della scelta delle condizioni iniziali.
Il pendolo e’ costituito da una molla e un cilindro di ottone. Ad un estremo della molla e’ fissato il cilindro, mentre l’altro estremo e’ fissato ad un supporto rigido Il moto di traslazione e’ registrato mediante un dispositivo MEMS collegato a datalogger che si connette a Phyphox via Bluetooth.
A seconda delle condizioni iniziali (per rotazione e traslazione) il moto del pendolo puo’ evolvere in modi diversi: battimento o rototraslazioni pseudo-stazionarie.
Nella figura 2 e’ mostrato il modo <battimento>: le oscillazioni verticali si smorzano lentamente via via che l’ampiezza delle oscillazioni rotazionali aumenta, successivamente il processo si inverte (circa ogni mezzo minuto) e lo scambio di energia tra i due moti continua.A partire dalle misure di spostamento z e di angolo di rotazione α si puo’ ottenere l’andamento nel tempo dell’energia totale ET di traslazione e dell’energia totale ER di rotazione:
ET= EkT + EeT= (m/2)v^2+(k/2)z^2
(con m massa, v=dz/dt velocita’ traslazionale e k costante elastica).
ER= EkR + EeR= 1/2 I ω^2 +(D/2) α^2
(con I momento di inerzia, ω=dα/dt velocita’ angolare e D costante di torsione).
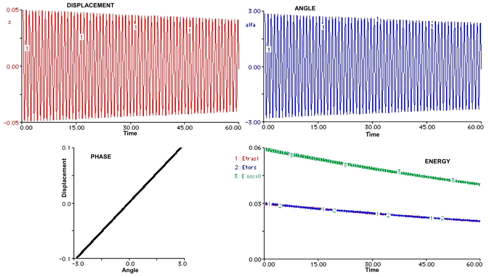
Una opportuna scelta del rapporto tra angolo e spostamento iniziale elimina il battimento l’energia viene ugualmente ripartita fra traslazione e rotazione (modo fondamentale pseudo stazionario) , come mostrato nella figura 3.
LabTrek produce due versioni del pendolo di Wilberforce : una per musei scientifici,robotizzata con attuatori pilotati da una scheda Arduino (un attuatore magnetico ferma il moto per cambiare regime dinamico senza toccare il pendolo). e una manuale per laboratori didattici, che consentono di attuare senza difficolta’ i tre diversi moti (battimento, rototraslazione levogira e rototraslazione destrogira)

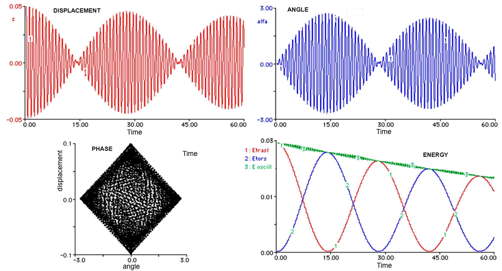 Figura 2. modo: battimento
Figura 2. modo: battimento